|
|
 Adding and subtracting matrixes
Transponing and multiplying matrixes
Determinants and algebraic complementations
Inverse matrixes and division of matrixes
Rotation of 3D-objects
Light emulation in 3D-scenes
Differential vector operators
Laplas, D' Alamber equations etc.
From vectors and matrixes to multidimensional functions,
Adding and subtracting matrixes
Transponing and multiplying matrixes
Determinants and algebraic complementations
Inverse matrixes and division of matrixes
Rotation of 3D-objects
Light emulation in 3D-scenes
Differential vector operators
Laplas, D' Alamber equations etc.
From vectors and matrixes to multidimensional functions,Adding and subtracting vectors and matrixes is simply adding and subtracting appropriate elements. Multiplying vectors has two modifications: vector multiplication, when we have vector as a result, and scalar multiplication, when we have number as a result. Scalar multiplication is strongly connected with the conception of basis in multidimensional space and the result of it is projection of one vector onto another. It is given by simple formulae:
A*B = Ai*BiNote the simple rule: when one index is repeated several times in the expression, it means sum of all elements with this index
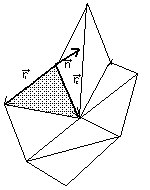
Vector multiplication is a bit more complicated. The result of it is the vector, ortogonal to both initial vectors, and the length of resulting vector is proportional to the square of triangle, created by two initial vectors. It is given by formulae: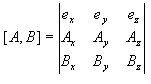
Note that in 3-dimensional space vector multiplication involves 2 vectors, but in N-dimensional space it requires N-1 vectors of N dimensions, but scalar multiplication always requires only 2 vectors.
The most common form of linear dependence between vectors is:
Bi = AijBjIt is called multiplication of vector and matrix. Such multiplication performs translating vector from one basis to another, and elements of the matrix is scalar multiplications of every vector of old basis on every vector of new basis:
Aij = ei*ejMatrix 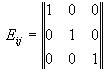 is called Kroneker matrix, or single matrix. It's evident, that
is called Kroneker matrix, or single matrix. It's evident, that
AiEij = Aj
If we want to translate one vector first to one basis, and then to the second basis, we must multiplicate initial vector twice by the matrixes of this translations. The result may be considered as a result of multiplication on one single matrix, which is multiplication of two initial matrixes. So the result of multiplication of two matrixes is the matrix of the same dimension, and is given by formulae:
Cij = AikBljEklThe matrix Bij = Aji is called transponded matrix of A.
Here is the Delphi unit implementing basic operations on matrixes and vectors Matrix.pas.
In 3-dimensional space the square of triangle between two vectors is given by vector multiplication:
S = [A,B]
and the space of figure between three vectors is given by scalar multiplication of S on the third vector:
V = C*S, or 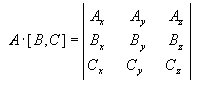
In N-dimensional case the "N-dimensional space" of the figure between N vectors is evaluated
as the determinant:
A definition of determinant is recurrent: determinant of N-dimensional matrix is
sum of mutiplications of i's elemnt of the first string on determinant of initial matrix without first string and i's column.
Here is some properties of determinant:
Let's try to find the matrix A-1 so that AA-1=1
The matrix A-1 is given by formulae:
Aij-1 = Sij /det(A)
where Sij is an algebraic complementation of [i,j] element - the determinant of initial matrix without i's string and j's column.
Remember to change sign on each next column.
Matrix A-1 is called inverse matrix.
Multiplication AB-1 is called division A by B.
Multiplication and division of matrixes is adding and subtracting of translations.
For example, if you translated initial vector from one basis to another by multiplying it on matrix A,
so you can translate it back by multiplying it on matrix A-1.
Here is the procedure evaluating determinant Determinant.pas and the Delphi unit implementing basic operations on matrixes and vectors Matrix.pas.
The most complicated areas of 3D-modelling is rotation of scenes and light emulation.
The rotations can be simply performed using polar system of coordinates. It's very simple to rotate objects in this coordinates, so rotating of the scene consists of several steps:
Emulating light is based on the dependance between intensivities of initial and reflected rays, given by formulae:
I(a) = I0*cos(a), or, using vectors I = L*n,
where a is an angle of decline of element of the lighted surface, L is "light" vector
and n is the vector of single length, ortogonal to the surface.
Every 3D-object which can be lighted consists of many plate polygons (let's consider them triangles for simplification). To built the lighted scene, we must evaluate the color of each polygon. Let's assume that we have the coordinates of all points of triangles of our surface. Then emulating light can be performed in several steps:
RGB-components of color of our initial triangle is proportional to the intensivity of reflected light.
At first let's see some formulaes of differential operators in vector algebra:
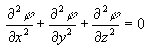
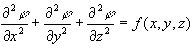
The most important equation is Laplas equation (or Puasson equation as more generalised type of equations). Laplas and Puasson equations is equations for such fields:
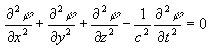
D' Alamber equation is an equation for running waves and is very similar to Laplas equation. You can solve it both in complex Minkouski space and by approximating continual space by discrete dynamic elements, moving according to Newton's laws.
We can simply generalise all methods of matrix algebra onto functions.
So scalar multiplication of functions is: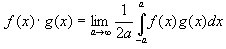
"Multiplication of vector by matrix":
Basis function is ortogonal if 
As you see now, Fourier analysis is only translating function as "vector" to another basis.
Now Fourier method is almost evident:
You can check whether the "basis function" f(w,t) = eiwt is ortogonal.
 English
English
 Беларуская
Беларуская
 Русский
Русский