|
|
Достатачно просто решать такие уравнения методами матричной алгебры (вычисляя детерминанты и т.д.) но чаще удобнее использовать метод Гаусса. Суть метода в последовательном исключении из уравнений переменных, домножая уравнение на некоторый коэффициент и вычитая из него другое уравнение системы так, чтобы коэффициент при одной из переменных в этом уравнении стал нулем. После таких преобразований система выглядит так:
a*x + b*y + c*z + d = 0Такую систему решать значительно легче, чем исходную. Пример Gauss.pas.
Наиболее простая система записи математических выражений для электронной обработки - обратная польская нотация. Например, выражение "(a + b)*(c - d)/sin(e)" в этой системе записывается как "a b + c d - * e sin /". В этой системе не нужны скобки. и все выражения могут быть вычислены с помощью простого алгоритма, использующего стек. Когда при проходе строки встречается переменная, она помещается в стек, а когда встречается знак математической операции, из стека извлекается нужное количество переменных, осуществляется операция и результат снова помещается в стек. Когда вся строка пройдена, остается лишь извлечь из стека результат (если формула была записана правильно, то это будет единственный элемент стека).
Перевод традиционной формы записи математических выражений в ОПН - немного более сложная операция. Она также осуществляется с использованием стека, но теперь это стек математических операций. Приоритете математических операций таков:
Алгоритм перевода таков:
Пример Calculator.pas.
Почти все приближенные методы основаны на разложении Тейлора:
Иногда это работает только для ограниченных d, и наилучшее приближение не достигается с увеличением числа итераций. Чтобы найти приближение с заданной ошибкой, достаточно сравнивать каждый следующий член ряда с текущим результатом.
Пример Tailorrw.pas
Чтобы решать системы любых уравнений, можно использовать такой метод. Пусть исходная система записана в форме
fi(x1,x2,...,xn)=0, i=1..n.
Используя линейное приближение, найдем k'е уточненное значение как решение такой ситемы линейных ураванений относительно xjk:
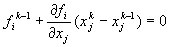
В случае одномерной функции эти операции выглядят так:
 - Двумерные волны на поверхности жидкости с учетом вязкости.
- Двумерные волны на поверхности жидкости с учетом вязкости.
 - Одномерный солитон на поверхности жидкости
- Одномерный солитон на поверхности жидкости
 - Одномерный солитон в плазме, на поверхности жидкости (без вязкости)
- Одномерный солитон в плазме, на поверхности жидкости (без вязкости)
 - Уравнение теплопроводности
- Уравнение теплопроводности
 - Уравнение Шредингера
- Уравнение Шредингера
 - Уравнение Ван-Дер-Поля для лампового генератора
- Уравнение Ван-Дер-Поля для лампового генератора
Моделирование интерференции и голографии как частного случая интерференции
требует сложения большого количества когерентных полей (с разными фазами и амплитудами, но одинаковыми частотами):
 . Результирующая амплитуда вычисляется как
. Результирующая амплитуда вычисляется как 
Пример Golography.zip
Все моделирование этого явления заключается в решении уравнений движения в суммарном поле всех остальных частиц. Пример Motion.zip
Как и в случае одной переменной, в двумерном случае разложение Фурье задается такой формулой:
Теперь мы имеем дело с волновыми векторами k и фаза вычисляется как f=k*r, где r = {x, y}. Исходное изображение преобразуется в набор волновых векторов. Качество отличное ;)), но ведь это только экспериментальная программа. Пример Compression.pas.
В этой версии популярной игры есть "Мирные" (положительные числа)
и "Чужие" (отрицательные числа), всех их можно "кормить",
причем "Мирные" и "Чужие" едят "положительную" и "отрицательную" пищу.
Клавиши "up","down","left","right" передвигают текущую позицию,
клавишами +/- (без Shift) устанавливаются положительные и отрицательные "существа",
клавишами "0" и "9" на месте курсора устанавливается еда (положительная либо отрицательная).
Нажмите Esc чтобы начать развитие существ.
Еще два интересных примера - Жизнь в трехмерном пространстве и Жизнь на поверхности тора.
Поверхность тора топологически ограничена, но границ не имеет.
Пример программы Life.pas
Следующих два примера - для Delphi и OpenGL под Delphi: Life3D.zip LifeTor.zip
Готовые программы: LifeTor.exe
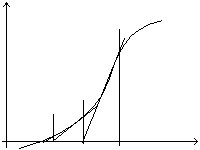
Метод наименьших квадратов - простой и быстрый способ получить неизвестные параметры в функциональных
зависимостях и оценить их погрешности. Пусть ожидаемая теоретическая зависимость -
y = f(x),
и мы получили ряд значений(xi, f(xi)). Тогда величину ошибки можно оценить как сумму квадратов всех отклонений
от теоретической зависимости: (xi - x0)2, где х0 - среднее значение х. Для достижения наилучшей точности эта ошибка должна быть минимальной.
Возьмем от полученной суммы по всем параметрам производные и приравняем их к нулю - получим систему уравнений для
этих параметров, решениями которой и будут наиболее вероятные их значения. В случае линейной зависимости
(а практически любая зависимость может быть линеаризована) имеем:
y = a*x + b

Если же параметр равен нулю по определению, то формулы становятся еще проще:
y = a*x

Такой метод можно применять для любых функциональных зависимостей. Например, такая задача возникла во время исследований свойств фракталов
(см. Теория протекания).
Результаты серии экспериментов - булевы величины Resi, зависящие от некоторого вещественного параметра qi.
Необходимо определить такое критическое значение параметра qcr, что для большинства qi<qcr
результат - true (позитивный), а для большинства qi>qcr результат - false (отрицательный).
Чтобы найти это значение параметра я рассмотрел функцию ошибок Ri(Resi,qi,qcr):
Ri(Resi,qi,qcr) = 1, если qi<qcr и Resi=False или qi>qcr и Resi=True
Ri(Resi,qi,qcr) = 0 во всех остальных случаях.
Суммарная ошибка для некоторого параметра qcr :
E =SRi(Resi,qi,qcr)(qi-qcr)2
Чтобы минимизировать ее, будем рассматривать Ri(Resi,qi,qcr)
как константы и используем некоторое число в качестве начального значения для qcr. Дифференцируя функцию суммарной ошибки E по qcr,
находим первое приближение для qcr. Это рекуррентный процесс, и j-е приближение для qcr:
qcr j =SRi(Resi,qi,qcr j-1)*qi / SRi(Resi,qi,qcr j-1)
После нескольких итераций может возникнуть неопределенность "0 / 0".
В этом случае итерации можно остановить, так как правильное значение уже найдено.
Тексты программ для общего случая и случая прямой пропорциональности соответственно
LSM.pas LSM1.pas
Готовые программы
LSM.exe LSM1.exe
Функции часто задаются неявно при помощи неопределенных интегралов:
g(a) = тb1b2 f(x,a)dx
Как b1, так и b2 могут стремится к бесконечности, либо сама функция f(x,a)
может обращаться в бесконечность в некоторых точках между b1 и b2.
Приближенное вычисление неопределенного интеграла - не самый быстрый способ получить значение
такой неявной функции. Более того, этот способ может оказаться практически бесполезным, когда
пределы интегрирования b1 и\или b2 стремятся к бесконечности.
Разложение функции в ряд и аналитическое интегрирование всех членов ряда - довольно быстрый метод.
Простейшие ряды - ряд Тейлора и ряд Фурье.
Ряду Тейлора присущ один недостаток - его нельзя проинтегрировать, когда пределы интегрирования
стремятся к бесконечности. Тогда для разложения можно использовать отрицательные степени
x или любые другие функции, интегрируемые на бесконечности. Например:
f(x) = a2/x2 + a3/x3 ... или:
f(x) = a1e-x + a2e-2x ...
и так далее. Коэффициенты ai могут быть получены так же, как и для ряда Тейлора:
ai = 1/i! dif(x)/df0i
где f0 - базисная функция разложения.
Коэффициенты могут быть также найдены приближенно, например, при помощи метода наименьших квадратов.
Теперь интегрирование осуществляется элементарно:
тҐa f(x)dx =
тҐa a2/x2 +
тҐa a3/x3 + ...
= -a2/a - 0.5*a3/a2...
Остается лишь просуммировать полученный ряд с необходимой точностью.
Очень важно, чтобы разложение по отрицательным степеням начиналось с x-2 -
это позволяет проинтегрировать ряд.
Бета-функция и гамма-функция - важные неявные функции.
Бета-функция определяется как:
B(p,q) = т10xp-1(1-x)q-1 dx (p>0, q>0)
Гамма-функция определяется как:
G(s) = тҐ0xs-1*Exp(-x) dx (s>0)
Процедура, возвращающая коэффициенты разложения (1-x)q в ряд Тейлора по x
и процедура, вычисляющая бета-функцию, используя разложение в ряд Тейлора при интегрировании, включены в модуль Matrix.pas.
 English
English
 Беларуская
Беларуская
 Русский
Русский